
Pointing accuracy and pointing drift during a grism observation
The pointing knowledge translates directly into knowing the position of the spectrum on the detector, and hence the wavelength scale. For that reason there follows here a discussion of the initial attitude and its refinement during an observation, the aspect correction for images and pointing accuracy.When the spacecraft slews to a new position, the initial attitude takes a five to ten seconds to settle towards a relatively fixed pointing. Observations often start when the pointing is not completely settled yet, but within 1-2" of the final pointing. During the observation, the information from the startrekkers on the spacecraft is used in the UVOT onboard processor to make small corrections. The corrections, called "shift-and-add" actually will add counts to different virtual detector pixels to correct for the drift. As a result, 5-10 pixels at the edge of the image are not well-exposed. When the next observation is started without executing a slew, the pointing in the image may be slightly different due to the drifts in attitude. As such the difference between the programmed pointing and the actual positions on the image provide some insight in the pointing stability and drift.
Since the attitude properties are the same for the lenticular filters (uvw2, uvm2,uvw1,u,b,v,white) and grisms, a study was made using subsequent images in the lenticular filters. Each of these was aspect corrected using the usual FTOOLS software to align point sources with the USNO-B1 catalog positions. The size of the correction needed gives information on the accuracy of the initial pointing, and the difference in the correction from these subsequent images an estimate of the drift.
The median size of the initial aspect correction shift that needs
to be applied to UVOT images is 3.4" with a standard deviation of 1.4"
and an extended tail (see top the figure below).
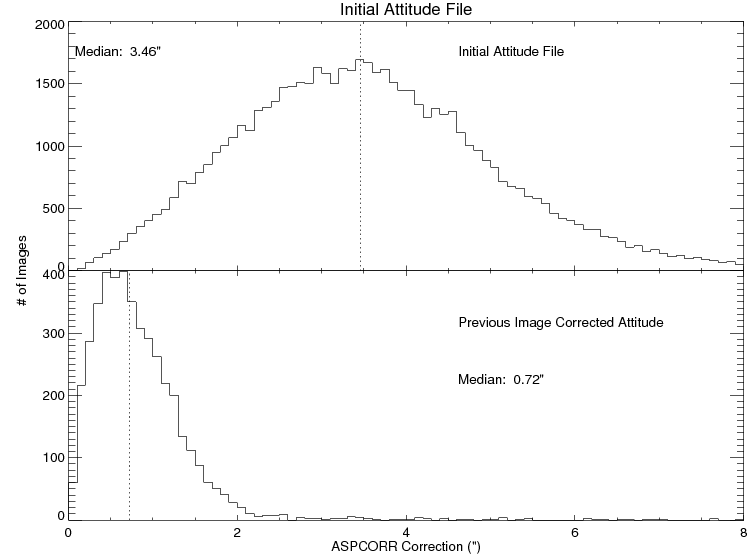
Most of this error typically occurs after a slew. Secondly, we are
interested
in determining what the relative error is for consecutive images taken
without a slew between them. We selected consecutive
aspect-corrected images in the archive where the start time for the
second image was less than 10 seconds after the stop time for the first
image. We then applied the same shift in RA and Dec computed for the
first image to the second image, and compared with the computed aspect
correction for the second image. The bottom plot in the attached figure
shows that the median error in this case is only 0.72" -- in other
words, even for images without an aspect correction, the (1 sigma)
median positional error will only be ~0.72" provided that there is a
another image with an aspect correction (and not separated by a slew).
The value of 0.72" can also be treated as an upper limit to
how much attitude errors in the onboard shift and add contribute to the
PSF.
Another test was possible using grism observations.
The uvw1 images used were several hundreds of seconds apart, since the grism exposure is typically ~430s, and the filter observation ~ 35 s each. In 23 exposures the mean drift in the X and Y position on the detector was about 4.4 and 4.1 +/- 2.5 pixels (1 pixel ~ 0.5 arcsec). The largest total drift found was 10.2 pixels (distance), and the mean drift (distance) is 6.4 +/- 2.7 pixels, which translates to about 3.2". This seems to be similar to the accuracy between slews as in the top of the image above, but much larger than the number found for consecutive images taken with a gap less than 10 s (~0.72"). Note however, that this is the drift between three images, not two.
This probably explains the difficulty in finding a good fit to the anchor position of some of the grism data. The difference with Waynes result is probably that for consecutive short images his analysis is correct, but that over the course of ~ 8 minutes the drift is larger.
The typical dispersion in the uv grism of 3.2Å/pixel and in the v grism of 6.0Å/pixel then tells us that a fundamental limitation to the accuracy of the anchor position for the wavelength scale due to drift in the spacecraft pointing can amount to about 20.5Å in the uv grism and 38Å in the V grism for individual spectra.
The position for the grism observation is thus best determined by interpolating the positions in uvw1 before and after which may half this error, as is suggested by the wavelength calibration results of the same set of data which was used for the uv clocked grism mode. Note that the spectral broadening due to the drift is comparable to the typical observed width across the spectrum at half max of about 8[5] pixels for the uv[v] grism, and that shift-and-add compensates for the drift during the exposure. The observations used were predominantly for one field (WR52) and may be biased. In the case of very large drift it is recommended to use the extraction based on the zeroth order position.
