Relationship to Beagle 2 Lander
 The stereo camera system is mounted on the PAW, an instrument cluster on
the end of the Beagle 2 lander robot arm. The stereo cameras are mounted
200 mm apart with a toe-in angle (or crossed eye angle) of 4.65°. This
gives a 100% image overlap at a distance of 1.2 m. The cameras are labelled
left and right after their respective halves of each stereo pair (think
of the PAW as a 'face' with the stereo cameras as 'eyes' and the Mossbauer
spectrometer as a 'nose').
The stereo camera system is mounted on the PAW, an instrument cluster on
the end of the Beagle 2 lander robot arm. The stereo cameras are mounted
200 mm apart with a toe-in angle (or crossed eye angle) of 4.65°. This
gives a 100% image overlap at a distance of 1.2 m. The cameras are labelled
left and right after their respective halves of each stereo pair (think
of the PAW as a 'face' with the stereo cameras as 'eyes' and the Mossbauer
spectrometer as a 'nose').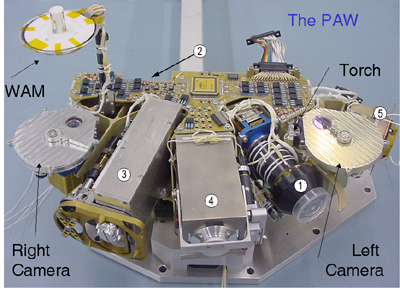 In addition to the stereo cameras the other PAW instruments are 1) the
Microscope, 2) the Mole (obscured here by the PAW electronics board), 3)
the Corer-Grinder, 4) the Mossbauer spectrometer and 5) the X-ray spectrometer.
In addition to the stereo cameras the other PAW instruments are 1) the
Microscope, 2) the Mole (obscured here by the PAW electronics board), 3)
the Corer-Grinder, 4) the Mossbauer spectrometer and 5) the X-ray spectrometer.