[Home] [Relationship
to Beagle 2 Lander] [Instrument
Design] [Scientific
Goals] [Filter
Allocation] [Status]
[Camera Images] [Mars
links]
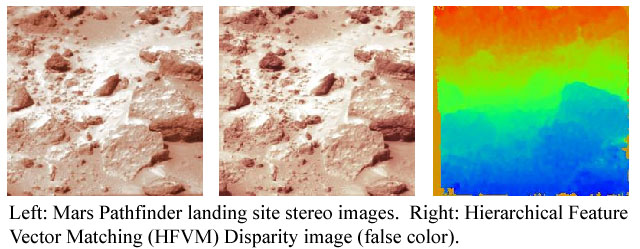
Digital Elevation Model
The process of converting stereo image pairs to a digital elevation map
(DEM) starts by generating a disparity image
(which contains information on the differences between the Left and
Right images). This is used to find the pixels representing the same scene
point in each image, allowing the distance to the point to be calculated.
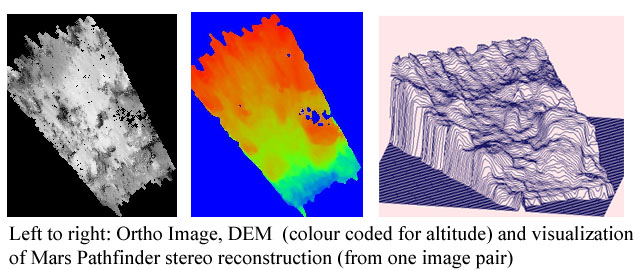
The x,y,z co-ordinates of all these points in space are stored as a table
of altitude (z) values or DEM (where the rows and columns represent the
discrete x,y co-ordinates).
The DEM therefore defines a surface in 3D space which is used to limit
the possible range of robot arm movements. Similarly a point of interest
in a stereo pair can be converted to the corresponding x,y,z co-ordinates
in the DEM. The robot arm could then be commanded to move one of the instruments
(i.e. the microscope) to those co-ordinates.
Back
15th February 2001